"Everything should be made as simple as possible but no simpler"
(attributed to Albert Einstein)
(attributed to Albert Einstein)
|
Research:
Our research focuses on modeling and developing original robots with unique mechanisms that allow for simple and efficient control. Besides crawling robots, we are also developing unique serial robotic mechanisms for space, agricultural, search & rescue and medical applications. Our robots have been featured 7 times on IEEE Spectrum and dozens of times in media outlets. YouTube lab page: YouTube |
|
Locomotion modeling
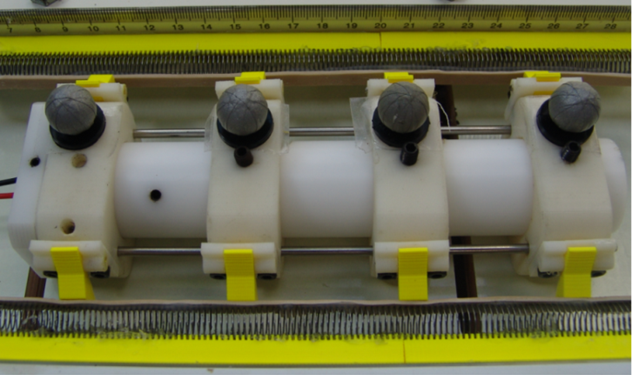
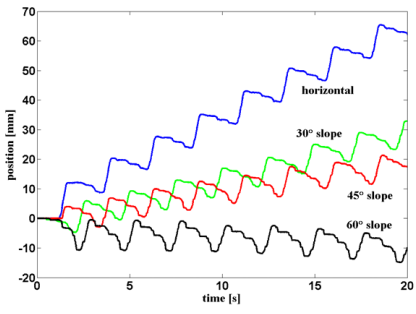
Much of our research focuses on the interaction between the legs of the robots and the surface with special focus on slipper and compliant contacts. One example of such an interesting interaction is the "one step forward and three steps back" which characterized the locomotion of a 4 cell worm robot
Much of our research focuses on the interaction between the legs of the robots and the surface with special focus on slipper and compliant contacts. One example of such an interesting interaction is the "one step forward and three steps back" which characterized the locomotion of a 4 cell worm robot
|
|
Numerical simulations
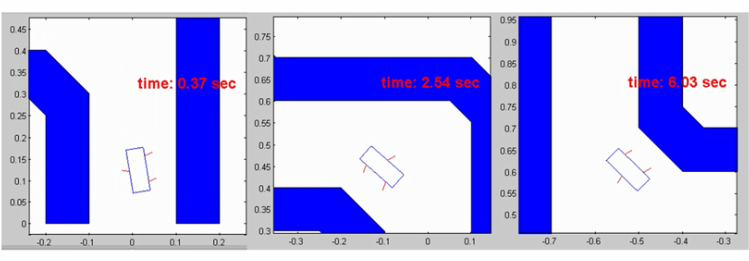
Numerical simulations, offer a strong tool to investigate the behavior of robots and serve as a primary verification of physical performance and under a variety of conditions and, as a result, save time and resources compared to experiments which can be later optimized based on simulation results. For small systems in particular, simulations provide estimates of parameters which are critical to the overall behavior of the robot but are extremely difficult to measure experimentally, including contact forces, actuation torques, leg deformations and sliding of the legs.
The effect of dynamic induced turning used in our 1STAR robot, and the "one step forward three steps effect" of the worm robots were first observed using numerical simulations that we developed.
Numerical simulations, offer a strong tool to investigate the behavior of robots and serve as a primary verification of physical performance and under a variety of conditions and, as a result, save time and resources compared to experiments which can be later optimized based on simulation results. For small systems in particular, simulations provide estimates of parameters which are critical to the overall behavior of the robot but are extremely difficult to measure experimentally, including contact forces, actuation torques, leg deformations and sliding of the legs.
The effect of dynamic induced turning used in our 1STAR robot, and the "one step forward three steps effect" of the worm robots were first observed using numerical simulations that we developed.
|
This minimally actuated continuous track robot robot can change its shape while actuated using 2 motors only (3 motors in the current design). The robot can climb over obstacles and pass over objects without touching them. the robot can be used for search and rescue applications, agriculture, pipe inspection, industrial maintenance and others. Developed at the Bio-Inspired and Medical Robotics Lab. at the Ben Gurion University of the Negev by Tal Kislasi and David Zarrouk. Appears on IEEE Robotics and Automation Letters. Winner of best paper RAL 2019
|
|
|
The amphibious STAR (AmphiSTAR) is a novel high-speed palm-sized robot fitted with a sprawling system and propellers at its bottom allowing it to crawl at high speed (3.5 m/s) or hover (run) over water (1.5 m/s). The 20cm robot can crawl over different surfaces such as gravel, mud, dirt, grass and concrete. It was inspired by cockroaches and basilisk lizard. The robot was designed at the Bioinspired and medical Robotics lab at the Ben Gurion University of the Negev. The AmphiSTAR High Speed Amphibious Sprawl Tuned Robot: Design and Experiments, to be presented at IROS 2020.
|
|
|
The MASR is a minimalistic (overly-redundant) serial robot which has passive joints that can be actuated by a movable motor. This is an automatic version with relies on a simple planning algorithm.
The minimalistic approach in this serial robot allows to reduce the number of motors, electronics and wiring, to reduce the weight and minimize costs. The robot can be used for search and rescue, agricultural, space, maintenance, cleaning, and other applications. Please see our IEEE IROS2020 and RAL paper: Design and Modelling of a Minimally Actuated Serial Robot, by Yotam Ayalon, Lior Damti and David Zarrouk. |
|
|
1STAR is the first robot that is driven by a single actuator but can be directly commanded to move straight or turn clockwise or counterclockwise. The legged robot relies on a novel actuation gait, which exploits the compliance disparity between alternate stance tripods, to generate rotation by continuously accelerating and decelerating the legs. The direction of turning depends on the configuration of the legs—tripod left or right—and the timing of the acceleration and deceleration. Alternating leg acceleration in successive steps allows for continuous rotation in the desired direction. Zarrouk and Fearing, IEEE TRO 2015.
|
|
|
Sprawl-tuned autonomous robot (STAR). This novel robot has a variable leg sprawl angle in the transverse plane to adapt its stiffness, height, and leg-to-surface contact angle. STAR is fitted with spoke wheel-like legs which provide high electromechanical conversion efficiency and enable the robot to achieve legged performance over rough surfaces and obstacles, using a high sprawl angle, and nearly wheel-like performance over smooth surfaces for small sprawl angles. Zarrouk et al. ICRA 2013
|
|
|
The worm robots presented here have a single motor which coordinates the motion of the cells and clamps. They are some of the fastest inchworm robots (the big inchworm can reach 5cm/s over horizontal surface) and likely the most efficient in terms of energy consumption. The inchworm robot can climb vertically hundreds of meters using 4 AAA off the shelf batteries
For technical details see Zarrouk et al. ASME, Journal of Mechanical Design, 2012. The wave robots presented here have a single motor which coordinates the motion of all the links. They are some of the fastest wave-like robots (top spee is 57 cm/s) and likely the most efficient in terms of energy consumption. The robot can crawl over sand, stones and mud and is very energy efficient.
For details see Zarrouk et al. Bioinspiration and Biomimetics 2016. |
|
